


Dto 2 Dormitorios En Barrio Lourdes Con Cochera
Publicado hace 4 meses por Metro Propiedades
Expensas desde $ 80.000
Información de la tienda
Metro Propiedades
Código de la propiedad
KP247283
Mudate financiando tus gastos con un préstamo personal
Completá tu DNI y conocé cuánto te podemos financiar.
Si no sos cliente Galicia, también podés pedirlo.
Seguí los pasos para obtener tu préstamo.
Conocé nuestra Política de datos personales al hacer una simulación.
Consejos de seguridad
Desde Mercado Libre, nunca te pediremos contraseñas, PIN o códigos de verificación a través de WhatsApp, teléfono, SMS o email.
Verificá que el inmueble exista y desconfiá si te dicen que necesitan vender o alquilar con urgencia.
Revisá el remitente de los e-mails para asegurarte que los envía Mercado Libre.
Solicitá la mayor cantidad posible de información sobre el inmueble, así como fotos y/o videos para comprobar su veracidad.
Sospechá si el precio te parece demasiado barato como para ser cierto.
No uses servicios de pago anónimos para pagar, reservar o adelantar dinero sin haber visto el inmueble.
















Ubicación
Cordoba 2533 6 A, Centro, Rosario, Santa Fe
Ver información de la zonaCaracterísticas del producto

Orientación: Norte

Cocheras: 1

Ascensor: Sí

Antigüedad: 16 años
Principales
Superficie total | 67 m² |
|---|---|
Superficie cubierta | 62 m² |
Superficie de balcón | 6 m² |
Ambientes | 4 |
Dormitorios | 2 |
Baños | 2 |
Cocheras | 1 |
Cantidad de pisos | 0 |
Departamentos por piso | 2 |
Tipo de departamento | Semi piso |
Disposición | Frente |
Orientación | Norte |
Antigüedad | 16 años |
Expensas | 80.000 ARS |
Comodidades y equipamiento
Acceso a internet | Sí |
|---|---|
Ascensor | Sí |
Seguridad
Con conexión para lavarropas | Sí |
|---|
Ambientes
Comedor | Sí |
|---|---|
Living | Sí |
Balcón | Sí |
Cocina | Sí |
Parrilla | Sí |
Servicios
Agua corriente | Sí |
|---|---|
Gas natural | Sí |
Calefacción | Sí |
Condiciones especiales
Amoblado | No |
|---|
Descripción
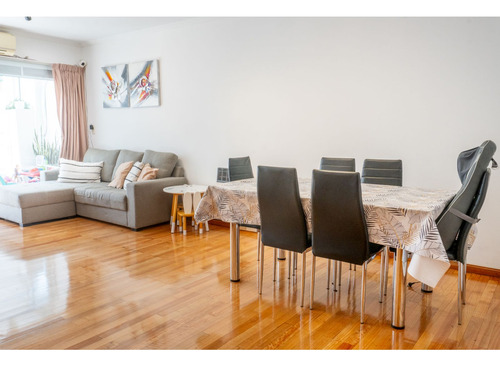
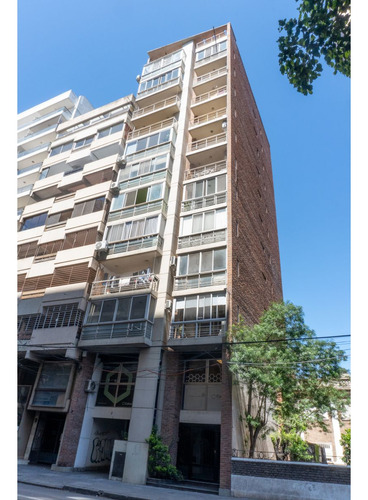
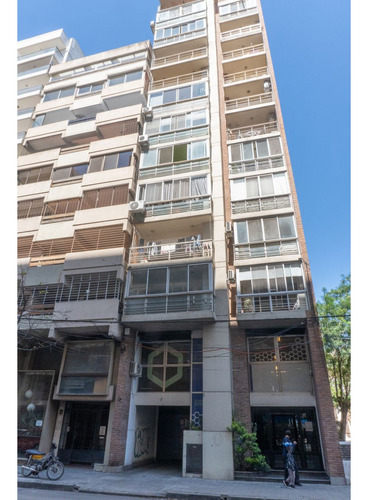
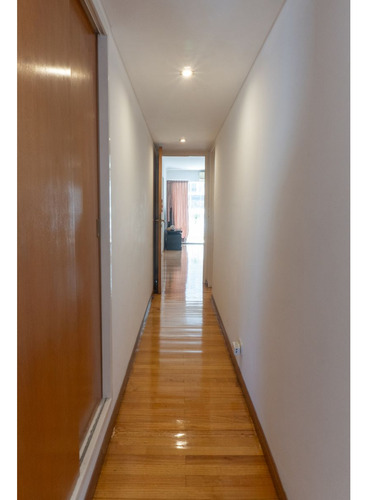
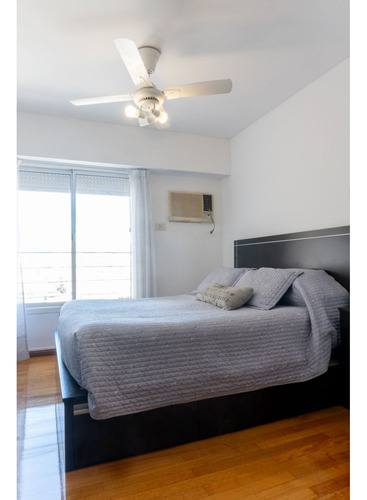
El departamento se encuentra en en 6to piso de una de las zonas mas buscadas de Rosario
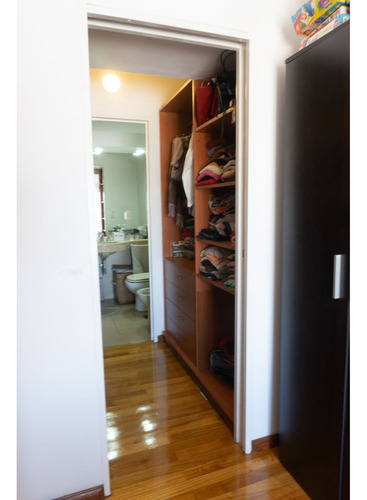
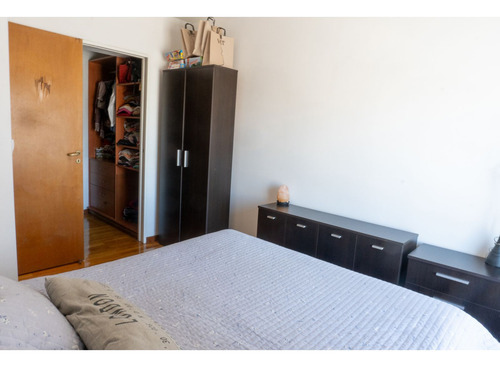
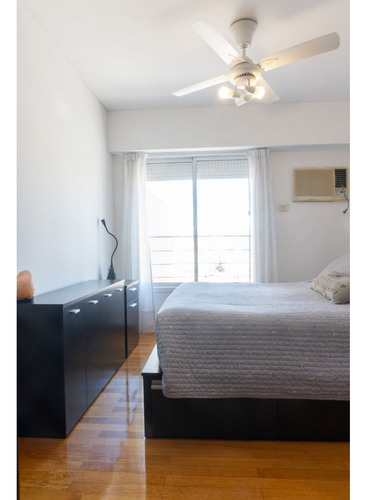
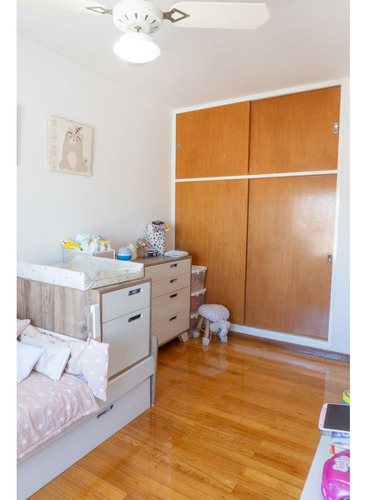
Cuenta con 2 habitaciones
Una de ellas en suite con vestidor.
2 baños completos con bañera.
Ventilación cruzada
Living comedor y cocina separada
El balcón es amplio y cuenta con un parrillero
La unidad incluye una cochera en planta baja de facil acceso con portón automatico
Se encuentra alquilado por 3 años hasta fines de Agosto del 2027
- KP247283 - KPT070401 -
- Publicado usando KiteProp CRM Inmobiliario